Semana 2
En esta semana seguimos con la estructura del pinball y esto de la estructura nos tomara un poco mas de tiempo ya que debemos tener las mismas medidas de ambos lados porque quedaría chueco y esto haría que no sé quede parado el proyecto por lo que son medidas distintas así que necesitamos unos días mas para terminar lo que es la estructura del pinball. La base no puede ir recta ya que si esta recta la canica no rodara sino que se volverá a ir a su punto de inicio, así que debemos ponerla de forma inclinada para que la bolita suba y haga puntos. Vamos un poco atrasadas a diferencia de los otros grupos ya que a veces no llevamos los materiales o llegamos tarde.
Logros:
Nos dimos cuenta que el pinball no puede estar recto y tiene que estar inclinada así que es la primera observación que hemos visto en nuestro proyecto.
Dificultades:
Nos estamos demorando mucho en lo que es la estructura ya que las medidas deben estar exactas y también porque el cartón no es muy flexible y como anteriormente lo dije se nos puede doblar y quedaría una estructura fea.
Logros:
Nos dimos cuenta que el pinball no puede estar recto y tiene que estar inclinada así que es la primera observación que hemos visto en nuestro proyecto.
Dificultades:
Nos estamos demorando mucho en lo que es la estructura ya que las medidas deben estar exactas y también porque el cartón no es muy flexible y como anteriormente lo dije se nos puede doblar y quedaría una estructura fea.
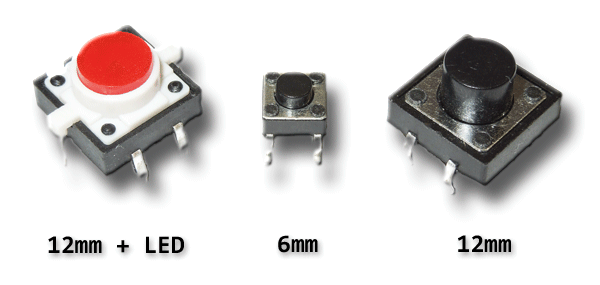
¿Que son pulsadores?
Estos pequeños pulsadores son un 1/4 ” por cada lado, son bastante económicos y se pueden ‘pinchar’ directamente en una placa de prototipado. Estos dispositivos mecánicos tienen 4 patillas, que pueden hacernos pensar que hay 4 cables que son EN y AP, pero de hecho, dos de cada lado en realidad dentro están unidos. Por tanto realmente, este pulsador es solamente un pulsador de 2 cables.
Programación con los pulsadores
// Constantes para definir los pines
const int pulsadorPin = 2;
const int ledPin = 13;
int valorPulsador = 0;
void setup() {
// Activamos los pines de entrada y salida
pinMode(pulsadorPin, INPUT);
pinMode(ledPin, OUTPUT);
}
void loop() {
// Leemos el valor del pin
valorPulsador = digitalRead(pulsadorPin);
// Encendemos o apagamos el pin del LED según convenga
if (valorPulsador == HIGH) {
digitalWrite(ledPin, HIGH);
}
else {
digitalWrite(ledPin, LOW);
}
}


Comentarios
Publicar un comentario